
I'm Stephen, a software engineer and former backend interface developer now creating web-based 3D visualisation tools for engaging data driven storytelling.
Interactive visualisation helps distill complex information into a simpler and more easily digestible form.
Experimental Demos

Flicshare
Flicshare is an experimental 3D visualisation tool with realtime peer group sharing across the web.

3D DNA Unzipping
An interactive 3D visualisation showing simple DNA unzipping.
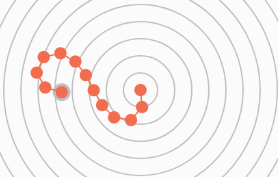
Inverse Kinematics
Common to most inverse kinematic (IK) algorithms is the trade-off between computational complexity and natural motion.
This is a 2D interactive visualisation of my computationally inexpensive IK that also produces organic and natural looking results.

Inverse Kinematics 3D
Still to come, a 3D interactive visualisation of my inverse kinematics.
This uses the same computationally inexpensive IK algorithm as demoed in 2D; the underlying code already calculates for 3D results.
Note: 3D vis dev is currently on hold due to other project workloads.
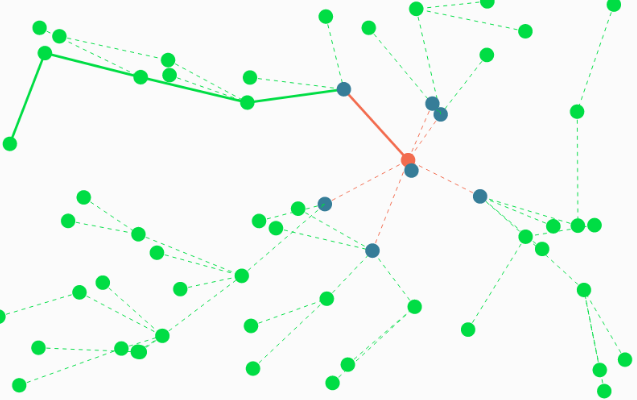
Multirobot Connectivity
Compared to complex single robots, multirobot systems are more fault tolerant and robust due to mechanically simpler and inexpensive individual units.
This is a 2D visualisation of my wireless connectivity chain formation in an ad-hoc multirobot system.

Current Tech Stack
JavaScript • WebGL with Three.js • WebRTC • Node.js • WebSockets
Amazon Web Services (AWS): Amazon EC2 (Linux instance) • S3 • Route 53 • CloudFront
On the horizon: ML • WebAssembly (with C/C++/Rust)
Historical / Occasional
C/C++ • Python • Java • Tcl
Industries
Defence (UK & US) • Healthcare • Finance
Contact Me
Connect with me via LinkedIn or by email:
info [at] stephenbull [dot] dev
